انواع سیستم ردیابی خورشیدی؛ از مدلهای تکمحوره تا فناوری هوشمند
فوریه 2, 2026
جدول ۱- انواع اصلی سیستمهای ردیابی خورشیدی
| ویژگیها و کاربردهای کلیدی | توضیحات | نوع سیستم |
| قیمت پایین، طراحی ساده، مناسب برای پروژههای کوچک و مناطقی با تابش خورشیدی بالا . |
پانل ها با زاویه ای ثابت نصب می شوند. | سیستم خورشیدی با شیب ثابت |
| خروجی انرژی بیشتر (12 تا 25 درصد بیشتر از سیستم ثابت)، که در سیستمهای مقیاس بزرگ رایج است (Drury et al., 2013). |
پنلها در یک جهت (افقی یا عمودی) حرکت میکنند و حرکت خورشید را در جهت شرق به غرب دنبال میکنند. |
سیستم ردیابی خورشیدی تک محوره |
| بالاترین میزان جذب انرژی (تا 30-45٪ بیشتر) با افزایش هزینه و پیچیدگی مکانیکی (Drury et al., 2013). |
پنلها در جهتهای افقی و عمودی چرخانده میشوند و جهت خورشید را با دقت بیشتری ردیابی میکنند. |
سیستم ردیابی خورشیدی دو محوره |
فناوریهای انرژی تجدیدپذیر، انقلابی در سیستم انرژی جهان ایجاد کردهاند و نقش حیاتی و رو به رشدی در مبارزه با گرمایش جهانی، کاهش انتشار کربن و مدیریت تقاضای فزاینده انرژی ایفا میکنند. این بررسی بر فناوری سیستم ردیابی خورشیدی و نقش آن در به حداکثر رساندن خروجی فتوولتائیک تمرکز دارد. انرژی خورشیدی فتوولتائیک (PV) در میان سایر فناوریهای تجدیدپذیر، از جهت مقیاسپذیری، کاهش هزینهها و قابلیت استفاده در طیف گستردهای از کاربردها از جمله نیروگاههای برق در مقیاس بزرگ و پشت بامهای مسکونی کوچک، نقش پیشرو را ایفا کرده است (Adak, 2025). با این حال، عملکرد ماژول فتوولتائیک خورشیدی آن به شدت به جهت و توانایی آن در جذب حداکثر تابش خورشیدی در طول روز بستگی دارد، اینجاست که سیستمهای ردیابی خورشیدی (STS) ضروری میشوند (Lamaamar et al., 2021).
بازار امروز تحت سلطه سه پیکربندی اصلی از تاسیسات نیروگاه خورشیدی است: سیستمهای شیب ثابت، سیستم ردیابی خورشیدی تک محوره و سیستم ردیابی خورشیدی دو محوره. این سیستمها بسته به اندازه پروژه، مکان و اولویتهای سرمایهگذاری، مزایا و معایبی دارند (Ripalda et al., 2020).
سیستم ردیابی خورشیدی یک سیستم مکانیکی و الکترونیکی است که برای جهتدهی پنلهای خورشیدی، بازتابندهها یا لنزها به سمت خورشید هنگام حرکت در آسمان استفاده میشود. ردیابها با تغییر مداوم زاویه تابش، اطمینان حاصل میکنند که ماژولهای خورشیدی تا حد امکان نور مستقیم خورشید را دریافت میکنند. ردیابهای خورشیدی در مقایسه با سیستمهای شیب ثابت، توانایی افزایش خروجی انرژی به میزان ۱۲ تا ۴۵ درصد را بسته به فناوری، جغرافیا و شرایط آب و هوایی دارند (Drury et al., 2013).
در طول 20 سال گذشته، توسعه طراحی مکانیکی، الگوریتمهای کنترل و ادغام با فناوریهای هوشمند، از جمله اینترنت اشیا (IoT) و هوش مصنوعی، ردیابها را بسیار قابل اعتماد و کارآمد ساخته است. این نوآوریها نقطه عطف مهمی در تکامل فناوری سیستم ردیابی خورشیدی هستند و راه را برای نسل بعدی سیستمهای ردیابی خورشیدی پیشرفته که قادر به بهینهسازی خودکار و عملکرد تطبیقی در شرایط مختلف هستند، هموار میکنند. در حال حاضر، آنها به طور گسترده در مزارع خورشیدی در مقیاس بزرگ استفاده میشوند و اکنون در کاربردهای تجاری و حتی مسکونی کوچکتر نیز در نظر گرفته میشوند (Boucif et al., 2025).
نوآوریهای اخیر منجر به طراحی سامانههای پیشرفته ردیابی خورشیدی شدهاند که الگوریتمهای پیشبینی مبتنی بر هوش مصنوعی، اتصال به اینترنت اشیا (IoT) و همگامسازی GPS را برای دستیابی به دقت بالاتر در تراز و پایداری عملیاتی، در خود جای دادهاند. این بهبودها گام بعدی در فناوری سیستمهای ردیابی خورشیدی هستند که به آن اجازه میدهند کارآمدتر، پیشبینانهتر و قادر به نظارت بر عملکرد در زمان واقعی باشد. این امر باعث شده است که ردیابهای مدرن تنها به حرکت مکانیکی محدود نشوند، بلکه به پلتفرمهای هوشمند بهینهسازی انرژی تبدیل گردند. اصلاح بیوقفه این سامانههای پیچیده برای کاهش هزینه همتراز شده برق (LCOE) و تسریع گذار جهانی به انرژی پاک، حیاتی است (Bastiani et al., 2023).
این مقاله یک بررسی جامع از سیستمهای ردیابی خورشیدی ارائه میدهد. این بررسی با فهرستی از انواع مختلف ردیابها آغاز میشود، سپس به ارزیابی عمیق مزایا و معایب آنها میپردازد. در ادامه، بحث به چالشهای موجود و فرصتهای آتی در این حوزه ادامه مییابد.
![]() شکل ۱- انواع اصلی سیستمهای ردیابی خورشیدی
شکل ۱- انواع اصلی سیستمهای ردیابی خورشیدی
۱- سیستم ردیابی خورشیدی چیست و چگونه کار میکند؟
این بخش تعریف دقیقی از هندسه و زوایای خورشیدی، منظور از سیستم ردیابی خورشیدی، نقش ضروری آن و اصل عملکرد آن، به منظور حداکثرسازی میزان انرژی خورشیدی جمعآوری شده، ارائه خواهد داد.
![]() شکل ۲- سیستم ردیابی خورشیدی تک محوره برای دنبال کردن مسیر خورشید و به حداکثر رساندن زاویه تابش برای بیشینه تبدیل انرژی فتوولتائیک.
شکل ۲- سیستم ردیابی خورشیدی تک محوره برای دنبال کردن مسیر خورشید و به حداکثر رساندن زاویه تابش برای بیشینه تبدیل انرژی فتوولتائیک.
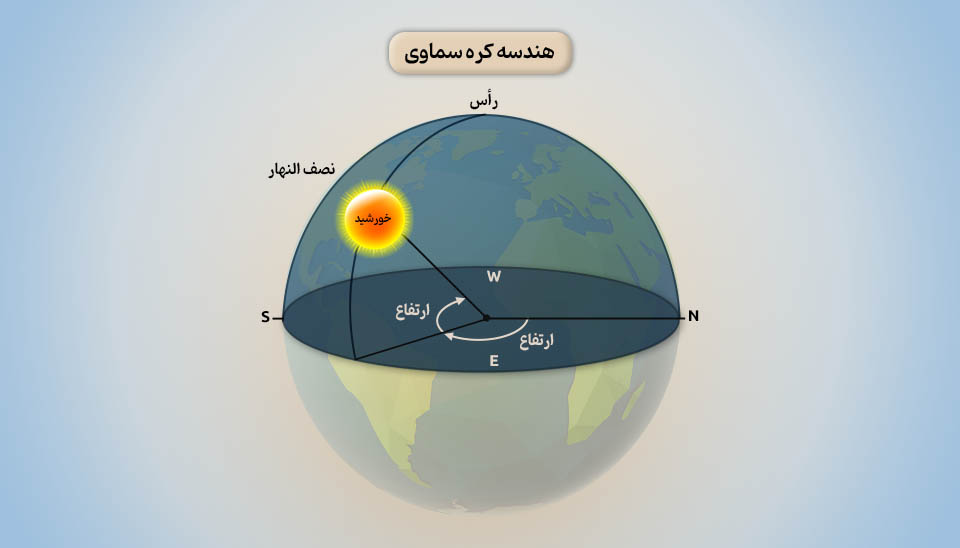
۱-۱- هندسه و زوایای خورشیدی
همانطور که در شکل ۳ مشاهده میشود، برای ناظری که در یک نقطه خاص روی زمین ایستاده است، موقعیت خورشید با دو زاویه اصلی تعیین میشود: زاویه ارتفاع (α) و زاویه سمت (θs).
![]() شکل ۳- زاویه ارتفاع و سمت
شکل ۳- زاویه ارتفاع و سمت
زاویه ارتفاع: زاویه ارتفاع، زاویه ارتفاع خورشید در آسمان است که نسبت به افق اندازهگیری میشود.
زاویه سمت: زاویه سمت یا آزیموت، زاویه انحراف از جنوب جغرافیایی حقیقی است. این بدان معناست که وقتی میگوییم سمت صفر درجه است، جهت ما جنوب جغرافیایی حقیقی است. وقتی میگوییم سمت منفی ده درجه است، منظورمان ده درجه به سمت جنوب شرقی است و وقتی میگوییم سمت مثبت ده درجه است، منظورمان ده درجه به سمت جنوب غربی خواهد بود. با این حال، برخی منابع علمی زاویه انحراف از شمال جغرافیایی حقیقی را سمت میدانند.
۲-۱- سیستم ردیابی خورشیدی چیست؟
ردیاب خورشیدی یک دستگاه الکترومکانیکی است که برای هدف قرار دادن یک پنل خورشیدی یا کلکتور خورشیدی به سمت خورشید که عنصر اصلی فناوری سیستم ردیابی خورشیدی است، استفاده میشود. هدف اصلی آن اطمینان از این است که سیستم انرژی خورشیدی در طول روز تا حد امکان نور خورشید را دریافت کند (Issa et al., 2025).
تابش خورشیدی، زاویه سمت خورشید، زاویه ارتفاع، زاویه شیب، زاویه میل و زاویه اوج، پارامترهای مهمی هستند که توسط فناوری سیستم ردیابی خورشیدی رصد و پردازش میشوند. مهمترین زوایا در تعیین موقعیت خورشید، زاویههای سمت و ارتفاع هستند. شکل 4 زوایای خورشیدی را نشان میدهد. سیستمهای ردیابی خورشیدی متحرک را میتوان به صورت دستی یا خودکار جابجا کرد. در بیشتر موارد، یک سیستم ردیابی خورشیدی شامل ملاحظات متعددی مانند یک یا دو موتور، انواع مختلف حسگرهای نوری و یک منبع تغذیه مستقل یا کمکی است. طبقهبندی این جنبهها به پارامترهای مختلفی از جمله نیروی محرکه، وسیله متحرک و نوع عملکرد آنها بستگی دارد (Amelia et al., 2020).
![]() شکل ۴- زوایای خورشیدی در ردیابی موقعیت خورشید (Yilmaz et al., 2015)
شکل ۴- زوایای خورشیدی در ردیابی موقعیت خورشید (Yilmaz et al., 2015)
۳-۱- چرا به سیستمهای ردیابی خورشیدی نیاز داریم؟
عملکرد بهینه سیستمهای فتوولتائیک در صورتی حاصل میشود که پنل عمود بر جهت تابش خورشید نگه داشته شود. از این رو، یک سیستم ردیابی خورشیدی روشی برای حفظ موقعیت بهینه پنل فتوولتائیک است (Amelia et al., 2020).کارایی پنلهای خورشیدی ثابت در اکثر کاربردهای فتوولتائیک، به ویژه هنگامی که فضای نصب آنها کم است، یک چالش بزرگ است. در این شرایط، سیستمهای ردیابی خورشیدی تأثیر قابل توجهی بر خروجی انرژی، از جمله کشتیهای کروز، اتومبیلهای برقی و ساختمانهای شهری با سقفهای کوچک، خواهند داشت. نمونهای از این مورد، استفاده از سیستم ردیابی خورشیدی دومحوره است که به طور مداوم جهت ماژولهای خورشیدی را پس از حرکت خورشید در طول روز تغییر میدهند تا بیشترین میزان قرار گرفتن در معرض خورشید و افزایش راندمان تبدیل حاصل شود. علاوه بر این، سیستمهای ردیابی در محیطهای سیار یا محدود نه تنها تولید انرژی را افزایش میدهند، بلکه وابستگی به منابع سنتی انرژی را نیز به حداقل میرسانند. آنها یک منبع انرژی تجدیدپذیر و قابل اعتماد در کشتیهای کروز ارائه میدهند و مصرف سوخت و انتشار گازهای گلخانهای را کاهش میدهند. به همین ترتیب، در خودروهای برقی و هیبریدی، میتوان از ردیابهای خورشیدی برای افزایش برد خودرو و کاهش دفعات شارژ استفاده کرد. ردیابها در شهرهای بزرگ به پشت بامها اجازه میدهند تا در هر متر مربع برق بیشتری تولید کنند که منجر به افزایش استقلال انرژی و پایداری میشود. با توجه به اینکه مناطق شهری نیاز به استفاده مؤثرتر از فضای موجود دارند، ادغام طرحهای سیستم ردیابی خورشیدی پیشرفته، عملکرد کلی را بهبود میبخشد و مقیاسپذیری فناوری سیستم ردیابی خورشیدی را برای شهرهای هوشمند آینده اثبات خواهد کرد (Hammas et al., 2025).
![]() شکل ۵- سیستم ردیابی خورشیدی دو محوره برای به حداکثر رساندن تولید انرژی.
شکل ۵- سیستم ردیابی خورشیدی دو محوره برای به حداکثر رساندن تولید انرژی.
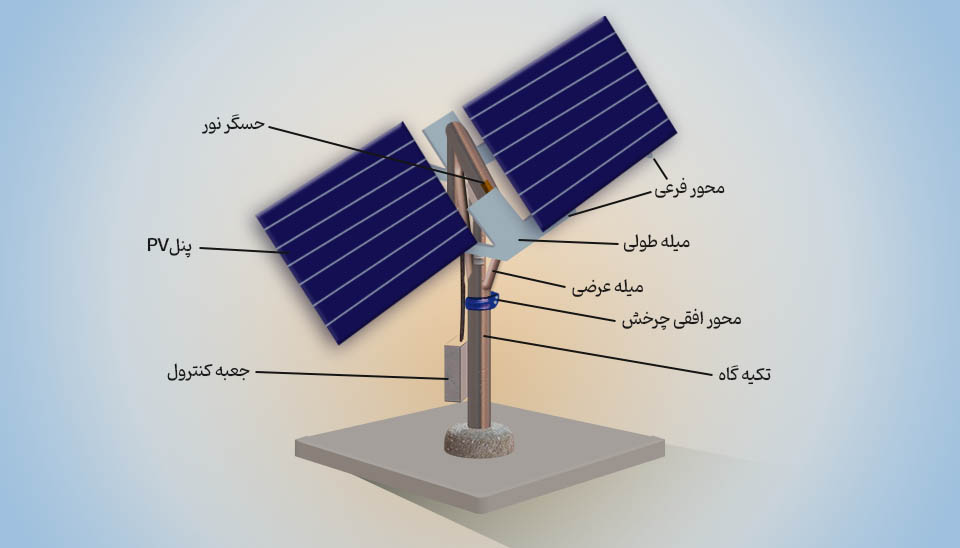
۴-۱- اجزای کلیدی و مکانیسم سیستم ردیابی خورشیدی
اجزای اصلی یک سیستم ردیابی خورشیدی، به ویژه در یک سیستم ردیابی خورشیدی پیشرفته شامل دستگاه ردیابی، الگوریتم ردیابی، واحد کنترل، سیستم موقعیتیابی، مکانیزم محرک و دستگاههای حسگر است. الگوریتم ردیابی، زوایای مورد استفاده برای موقعیتیابی ردیاب خورشیدی را تعیین میکند. دو نوع الگوریتم وجود دارد: الگوریتمهای نجومی و الگوریتمهای شدت نور در زمان واقعی، که هر دو عناصر بنیادی فناوری مدرن سیستم ردیابی خورشیدی هستند. الگوریتم نجومی یک الگوریتم کاملاً ریاضی است که بر اساس منابع نجومی ساخته شده است. الگوریتم شدت نور بر اساس خوانشهای شدت نور در زمان واقعی است. واحد کنترل الگوریتم ردیابی را اجرا کرده و سامانهی موقعیتیابی و سازوکار محرک را مدیریت میکند. سامانهی موقعیتیابی دستگاه ردیاب را راهنمایی میکند تا با زوایای محاسبهشده، رو به خورشید قرار گیرد. سامانهی موقعیتیابی میتواند الکتریکی یا هیدرولیکی باشد. مکانیزم محرک مسئول حرکت دادن دستگاه ردیاب به موقعیت تعیینشده توسط سامانهی موقعیتیابی است (RAJAN K, 2016).
۲- انواع سیستم ردیابی خورشیدی؛ از تکمحوره تا دومحوره
سیستمهای ردیابی خورشیدی دارای طبقهبندیهای متعددی هستند. آنها را میتوان بر اساس سامانهی کنترل مورد استفاده، عملگرهای (Actuators) بهکارگرفتهشده، راهبرد ردیابی اجرا شده، یا درجه آزادی حرکت طبقهبندی کرد (Awasthi et al., 2020). در این مطالعه، ما دو مورد از رایجترین رویکردهای طبقهبندی برای سامانههای ردیابی خورشیدی را بررسی میکنیم: (۱) طبقهبندی بر اساس مکانیزم محرک به کار رفته و (۲) طبقهبندی بر اساس تعداد درجات آزادی.
۱-۲- طبقهبندی بر اساس سیستم محرک
اولین و رایجترین طبقهبندی یک سیستم ردیابی بر اساس سیستم محرک آن است که میتواند به سیستمهای ردیابی فعال، غیرفعال، نیمهفعال و دستی تقسیم شود، دستههایی که توسط فناوری سیستم ردیابی خورشیدی زیربنایی تعیین میشوند (Hafez et al., 2018).
۱-۲-۲- سیستم ردیابی خورشیدی غیرفعال
این رویکرد غیرفعال شامل محرکهای مکانیکی برای هدایت پنل به سمت تابش خورشیدی نیست؛ این یک فناوری جایگزین سیستم ردیابی خورشیدی است که برای زمینههای کمهزینه بهینه شده است. در عوض، از سیالات گازی تحت فشار و نقطه جوش پایین یا آلیاژهای حافظهدار شکلی (SMAs) به عنوان محرک استفاده میکند. این محرکها با دریافت تابش ناهموار، پنل را مجبور به انجام حرکات زاویهای خاصی میکنند تا تعادل تابش را از طریق القای انبساط حرارتی در گازهای منبسطشونده یا آلیاژهای حافظهدار دوباره برقرار کنند. هنگامی که یک طرف گاز مایع مقدار بیشتری انرژی حرارتی نسبت به طرف دیگر دریافت میکند، گاز منبسط شده و به سمت طرف مقابل ردیاب حرکت میکند. این امر باعث ایجاد یک کشش گرانشی نامتعادل میشود و پنل را مجبور به کج شدن میکند تا به نقطهای با تابش برابر برسد. اگرچه این سیستم پیچیدگی کمتری دارد، اما در دماهای پایین راندمان بالایی ندارد. با وجود دقت پایینتر، این ردیاب به دلیل هزینه کم و نگهداری آسان، عملاً مقرون به صرفه است (Awasthi et al., 2020).
![]() شکل ۶- فرآیند کار یک سیستم ردیابی خورشیدی غیرفعال (Hammoumi et al., 2022)
شکل ۶- فرآیند کار یک سیستم ردیابی خورشیدی غیرفعال (Hammoumi et al., 2022)
۲-۱-۲- سیستم ردیابی خورشیدی فعال
این سیستمها از محرکهای الکتریکی و قابهای مکانیکی، یک خانواده از فناوری سیستم ردیابی خورشیدی فعال که به حسگرها، موتورها و ریزپردازندهها متکی است، استفاده میکنند. این نوع سیستم از حسگرها، موتورهای الکتریکی و ریزپردازندهها برای ردیابی استفاده میکند که دقیقتر و کارآمدتر از ردیابهای خورشیدی غیرفعال است. با این حال، این ردیابها انرژی مصرف میکنند. هنگامی که ردیابها به درستی با خورشید تراز نیستند، حسگرها نور نامساوی دریافت کرده و یک سیگنال تولید میکنند. این سیگنال توسط یک مقایسهگر یا ریزپردازنده برای تعیین حرکت مناسب در جهت صحیح استفاده میشود. سپس سیگنال لازم به موتورها فرستاده میشود تا مطابق با آن عمل کنند. این فرآیند در نقطهای که حسگرها نور مساوی دریافت میکنند، متوقف میشود.
سیستمهای ردیابی فعال بر اساس درایوهای کنترلی خود، یعنی سیستمهای ردیابی حلقه بسته، حلقه باز و ترکیبی، تقسیمبندی میشوند. علاوه بر سیستمهای ردیابی حلقه بسته و حلقه باز، سیستمهای فعال نیز به سیستمهای کنترل هوشمند، سیستمهای کنترل ریزپردازنده و سیستمهای کنترل مبتنی بر حسگر طبقهبندی میشوند (Awasthi et al., 2020), (Seme et al., 2020).
![]() شکل ۷- سیستمهای محرک (الف) سیستم ردیاب خورشیدی غیرفعال (ب) سیستم ردیاب خورشیدی فعال (Seme et al., 2020)
شکل ۷- سیستمهای محرک (الف) سیستم ردیاب خورشیدی غیرفعال (ب) سیستم ردیاب خورشیدی فعال (Seme et al., 2020)
جدول ۲- مقایسه ردیابهای خورشیدی غیرفعال و فعال
| معایب | مزایا | توضیحات | فناوری |
|
|
|
غیرفعال |
|
|
|
فعال |
۳-۱-۲- سیستم ردیابی خورشیدی نیمه غیرفعال
سیستم ردیابی خورشیدی نیمهفعال، طرحهای ترکیبی ردیابی/متمرکزکننده هستند که هدف آنها حفظ تقریباً عمود بودن پرتوهای خورشیدی بر سطح جاذب و در عین حال به حداقل رساندن تحریک مکانیکی و مصرف انرژی است. برخلاف سیستمهای کاملاً فعال که از حرکت مداوم موتور استفاده میکنند، سیستمهای نیمهفعال عناصر نوری یا حرارتی غیرفعال را با تنظیمات مکانیکی محدود ترکیب میکنند تا عدم همترازی را اصلاح کنند. به عنوان مثال، سیستم ممکن است از یک آرایه میکرو-هلیوستات استفاده کند که نور خورشید را به یک لنز فرنل ثابت یا با حداقل حرکت و گیرنده منعکس میکند و حرکت مکانیکی مورد نیاز را کاهش میدهد (Teles et al., 2022).
![]() شکل ۸- سیستمهای ردیاب خورشیدی نیمهفعال
شکل ۸- سیستمهای ردیاب خورشیدی نیمهفعال
۴-۱-۲- سیستم ردیابی خورشیدی دستی
سیستم ردیابی خورشیدی دستی روشی است که در آن سیستم میتواند با تغییر دستی زاویه شیب با استفاده از یک چرخ دستی یا چرخ دنده، زاویه خورشید را از فصلی به فصل دیگر ردیابی کند. محور زاویه شیب دستی میتواند به عنوان محور ثانویه در سیستمهای ردیابی دو محوره استفاده شود که نسبت به پیادهسازی یک موتور دوم ارزانتر است (Hafez et al., 2018).
![]() شکل ۹- ردیاب خورشیدی دستی Luciole & Basilic
شکل ۹- ردیاب خورشیدی دستی Luciole & Basilic
۲-۲- طبقهبندی بر اساس درجه آزادی
درجه آزادی نشان دهنده تعداد جهاتی است که حرکت مستقل میتواند در آنها رخ دهد. بر این اساس، سیستمهای ردیابی به سیستم ردیابی خورشیدی تک محوره و سیستم ردیابی خورشیدی دو محوره طبقهبندی میشوند. قبل از بررسی این طبقهبندی، اجازه دهید انواع مختلف محورها و زوایایی را که نقش مهمی در این سیستمهای ردیابی ایفا میکنند، بررسی کنیم. این پارامترها برای تعیین مکانها و جهتهای مناسب ضروری هستند:
عرض جغرافیایی اندازهگیری موقعیت یک نقطه روی سطح زمین است که تعیین میکند آن نقطه نسبت به خط استوا چقدر در شمال یا جنوب قرار دارد. همانطور که در شکل 10 نشان داده شده است، این پارامتر در زوایای مختلف از 0 درجه در استوا تا 90 درجه در قطبها اندازهگیری میشود.
![]() شکل ۱۰- عرض جغرافیایی
شکل ۱۰- عرض جغرافیایی
زاویه تابش: زاویه بین پرتو تابش خورشید و خط عمود بر سطح، زاویه تابش نامیده میشود، همانطور که در شکل 11 نشان داده شده است.
 شکل ۱۱- زاویه تابش
شکل ۱۱- زاویه تابش
زاویه انحراف: محور چرخش زمین نسبت به صفحه چرخش آن به دور خورشید، انحراف زاویهای حدود ۲۳.۵ درجه دارد و این انحراف در طول مسیر زمین در مدار خود به دور خورشید، در جهت یکسانی باقی میماند. همانطور که با “δ” در شکل ۱۲ نشان داده شده است، زاویه انحراف محور زمین باعث میشود که مکان همین کمان در آسمان در طول سال تغییر کند (Karafil et al., 2015).
![]() شکل ۱۲- زاویه انحراف
شکل ۱۲- زاویه انحراف
زاویه ارتفاع: این زاویه بین افق و خطی است که مرکز خورشید را به مرکز زمین وصل میکند(α)، همانطور که در شکل 13 نشان داده شده است.
زاویه اوج: این زاویه بین محور عمودی و خطی است که مرکز خورشید را به زمین وصل میکند (z). زوایای اوج و ارتفاع مکمل یکدیگر هستند.
![]() شکل 13- زاویههای اوج و ارتفاع
شکل 13- زاویههای اوج و ارتفاع
زاویه شیب: این زاویه بین پنل خورشیدی فتوولتائیک و محور افقی است (همانطور که در شکل 14 نشان داده شده است). زاویه تابش نوعی زاویه شیب است.
![]() شکل 14- زاویه شیب
شکل 14- زاویه شیب
زاویه آزیموت خورشیدی: زاویه آزیموت خورشیدی یک معیار زاویهای از سیستم مختصات کروی است. بردار نقطه مورد نظر ناظر عمود بر صفحه مرجع تصویر میشود و زاویه بین بردارهای تصویر شده و مرجع، آزیموت نامیده میشود. وقتی صحبت از زاویه آزیموت خورشیدی میشود، مرکز زمین نقطه مشاهده و مرکز خورشید نقطه مورد نظر است. بردار مرجع به طور سنتی به سمت جنوب جهتگیری میشود، اگرچه قرارداد جهتگیری مرجع به سمت شمال، همانطور که در شکل 15 نشان داده شده است، بیشترین توافق را دارد. این زاویه در جهت عقربههای ساعت محاسبه میشود، یعنی شرق 90 درجه، جنوب 180 درجه و غرب 270 درجه است (Awasthi et al., 2020).
 شکل ۱۵- زاویه آزیموت و ارتفاع
شکل ۱۵- زاویه آزیموت و ارتفاع
۱-۲-۲- سیستم ردیابی خورشیدی تک محوره
سیستمهای ردیابی خورشیدی تک محوره (SAT) سیستمهای ردیابی فتوولتائیکی هستند که یک درجه آزادی ارائه میدهند، یعنی میتوانند حول یک محور بچرخند تا حرکت خورشید را در آسمان ردیابی کنند. این محور میتواند بسته به طراحی و عرض جغرافیایی محل، افقی (شرق-غرب)، عمودی (شمال-جنوب)، کج یا قطبی باشد (Sadeghi et al., 2025).
![]() شکل ۱۶- سیستمهای ردیابی خورشیدی تک محوره: (الف) تک محور افقی، (ب) تک محور عمودی، و (ج) تک محور کج شده (Seme et al., 2020).
شکل ۱۶- سیستمهای ردیابی خورشیدی تک محوره: (الف) تک محور افقی، (ب) تک محور عمودی، و (ج) تک محور کج شده (Seme et al., 2020).
۱-۱-۲-۲- سیستم ردیابی خورشیدی تک محوره افقی
محور چرخش ردیاب تک محوره افقی (HSAT) نسبت به زمین افقی است. ردیابی معکوس یکی از چالشها در محاسبه محل قرارگیری پنلها است. با محاسبه عملکرد نوری پنلهای خورشیدی HSAT، مشخص شد که این پنلها در جهت شرق-غرب بدترین عملکرد را برای افزایش انرژی دارند، در حالی که یک HSAT در جهت شمال-جنوب، راندمان را به طور قابل توجهی حدود 12٪ افزایش میدهد (Drury et al., 2013).
![]() شکل ۱۷- سیستم ردیابی خورشیدی تک محوره که شیب پنلهای فتوولتائیک را تنظیم میکند
شکل ۱۷- سیستم ردیابی خورشیدی تک محوره که شیب پنلهای فتوولتائیک را تنظیم میکند
۲-۱-۲-۲- سیستم ردیابی خورشیدی تک محوره عمودی
محور چرخش ردیابهای تک محوره عمودی (VSAT) نسبت به زمین عمودی است. این یک سیستم ردیابی است که میتواند در جهت شمال/جنوب یا شرق/غرب قرار گیرد و با حرکت بالا/پایین حرکت کند. این سیستمها به ویژه در مناطق شمالی که عرض جغرافیایی آنها بین ۴۰ تا ۵۰ درجه است، مفید هستند (Priyam, 2023).
قبل از انتخاب ردیاب، شناخت انواع سلولهای خورشیدی سیلیکونی برای درک بهتر راندمان نهایی ضروری است.
![]() شکل ۱۸- سیستم ردیابی خورشیدی تک محوره عمودی، پنلهای فتوولتائیک را از شرق به غرب میچرخاند
شکل ۱۸- سیستم ردیابی خورشیدی تک محوره عمودی، پنلهای فتوولتائیک را از شرق به غرب میچرخاند
۳-۱-۲-۲- سیستم ردیابی خورشیدی تک محوره کج
ترکری که محورهای چرخش آن بین افقی و عمودی باشد، ترکر تک محوره کج (Tilted Single-Axis Tracker) نامیده میشود. زوایای کج شدن ترکر اغلب محدود میشوند تا پروفیل باد کاهش یابد و ارتفاع انتهایی به حداقل برسد (RAJAN K, 2016). از آنجا که صفحه ماژول عموماً موازی با محور چرخش تراز شده است، با حرکت ردیاب، یک سطح استوانهای را جاروب میکند. شیب اغلب به زوایای متوسط محدود میشود تا پروفیل باد کاهش یابد (یعنی نیروهای درگ و لیفت کاهش یابد) و ارتفاع انتهای مرتفع از سطح زمین کاهش یابد، که این امر طراحی فونداسیون و دسترسی به تعمیر و نگهداری را نیز ساده میکند (Sadeghi et al., 2025).
![]() شکل ۱۹- مزرعه خورشیدی با استفاده از سیستمهای ردیابی خورشیدی تک محوره کج پیشرفته برای افزایش بازده انرژی روزانه.
شکل ۱۹- مزرعه خورشیدی با استفاده از سیستمهای ردیابی خورشیدی تک محوره کج پیشرفته برای افزایش بازده انرژی روزانه.
۲-۲-۲- سیستم ردیابی خورشیدی دو محوره
سیستمهای ردیابی خورشیدی دو محوره دارای دو درجه آزادی هستند که به عنوان محورهای چرخش عمل میکنند. این محورها معمولاً عمود بر یکدیگر هستند. محوری که نسبت به زمین ثابت است را میتوان محور اصلی در نظر گرفت. محوری که به محور اصلی ارجاع داده میشود را میتوان محور ثانویه در نظر گرفت. ردیابهای دو محوره به دلیل تواناییشان در دنبال کردن خورشید به صورت عمودی و افقی، دستیابی به سطح بهینه انرژی خورشیدی را ممکن میسازند. فرقی نمیکند خورشید در کجای آسمان باشد، سیستمهای ردیابی خورشیدی دو محوره میتوانند پنل را در تماس مستقیم با خورشید قرار دهند (RAJAN K, 2016).
![]() شکل ۲۰- سیستمهای ردیابی فتوولتائیک دو محوره: (الف) سیستم ردیابی خورشیدی دو محوره نوک-شیب Tip-Tilt (ب) سیستم ردیابی خورشیدی دو محوره ارتفاع-سمت (Emon, 2022)
شکل ۲۰- سیستمهای ردیابی فتوولتائیک دو محوره: (الف) سیستم ردیابی خورشیدی دو محوره نوک-شیب Tip-Tilt (ب) سیستم ردیابی خورشیدی دو محوره ارتفاع-سمت (Emon, 2022)
۱-۲-۲-۲- سیستم ردیابی خورشیدی دو محوره ارتفاع-سمت (AADAT)
سیستم ردیابی خورشیدی دو محوره ارتفاع-سمت دارای یک محور اصلی (محور سمت یا آزیموت) است که نسبت به زمین عمودی است و یک محور ثانویه (محور ارتفاع) که عمود بر محور اصلی است. محور آزیموت یک شفت محوری عمودی یا یک پایه حلقهای افقی است که به دستگاه اجازه میدهد در جهت نقطه قطبنما بچرخد. محور دوم یک محور ارتفاعی افقی است که بر روی محور آزیموت نصب شده است. چنین سیستمهایی ممکن است تحت کنترل کامپیوتر بر اساس جهت خورشید کار کنند، یا ممکن است از یک حسگر ردیابی برای کنترل محرکهای موتوری که پنلها را به سمت خورشید هدایت میکنند استفاده کنند (Ray and Tripathi, 2016).
![]() شکل ۲۱- سیستم ردیابی خورشیدی پیشرفته دو محوره با قابلیت تنظیم ارتفاع-سمت، خروجی انرژی برتر را تحت موقعیتهای متغیر خورشید تضمین میکند.
شکل ۲۱- سیستم ردیابی خورشیدی پیشرفته دو محوره با قابلیت تنظیم ارتفاع-سمت، خروجی انرژی برتر را تحت موقعیتهای متغیر خورشید تضمین میکند.
۲-۲-۲-۲- سیستم ردیابی خورشیدی دو محوره نوک شب (TTDAT)
ردیاب دو محوره TTDAT از یک محور افقی با زمین استفاده میکند و محور ثانویه عمود بر محور اصلی نصب میشود. محور اصلی سیستم TTDAT نسبت به زمین افقی است، در حالی که محور ثانویه عمود بر محور اصلی است. این امر پنل را قادر میسازد تا هم در جهت شیب (ارتفاع) و هم در جهت نوک (شبیه آزیموت) حرکت کند تا یک سیستم دو درجه آزادی برای جهتگیری دقیق خورشیدی فراهم کند (Shankar and Singh, 2014). در عمل، سازههای TTDAT اغلب به صورت تیرک نصب میشوند، که در آن ماژول از طریق یک مفصل یونیورسال یا تکیهگاه حلقهای بسته میشود تا امکان حرکت مستقل در هر دو محور فراهم شود. حرکت نوک، پنل را در جهت شرق-غرب تنظیم میکند تا مسیر افقی خورشید را دنبال کند، در حالی که حرکت شیب، تغییرات فصلی در ارتفاع خورشید را اصلاح میکند. به دلیل این جداسازی حرکات، TTDAT در مقایسه با طرحهای سیستم ردیابی خورشیدی دو محوره ارتفاع-آزیموت، سادگی مکانیکی را ارائه میدهد، به ویژه در مدیریت کابل و کاهش تداخل بین محورها (RAJAN K, 2016).
 شکل ۲۲- مزرعه خورشیدی مدرن، سیستمهای ردیابی خورشیدی دو محوره با قابلیت چرخش نوک-شیب را برای برداشت برتر انرژی خورشیدی به نمایش میگذارد.
شکل ۲۲- مزرعه خورشیدی مدرن، سیستمهای ردیابی خورشیدی دو محوره با قابلیت چرخش نوک-شیب را برای برداشت برتر انرژی خورشیدی به نمایش میگذارد.
۳-۲- سیستمهای ردیابی خورشیدی پیشرفته و نوظهور
در طول چند سال گذشته، توسعه فناوریهای ردیابی خورشیدی، به ویژه معماریهای سیستم ردیابی خورشیدی پیشرفته، سیستمهای مکانیکی سنتی را به سیستمهای هوشمندتر، به هم پیوستهتر و تطبیقیتر تغییر داده است. نوآوریهای دنیای مدرن، ویژگیهای هوش مصنوعی (AI)، اینترنت اشیا (IoT)، هماهنگسازی سیستم موقعیتیابی جهانی (GPS) و روشهای کنترل ترکیبی را برای افزایش دقت، کارایی و قابلیت اطمینان سیستمهای فتوولتائیک ترکیب میکنند. این ردیابهای پیشرفته نه تنها تولید انرژی را در شرایط متغیر آب و هوا و تابش بهینه میکنند، بلکه با کنترل پیشبینیکننده و بهینهسازی بلادرنگ، هزینههای عملیاتی و نگهداری را نیز به حداقل میرسانند. بنابراین، آنها گامی بزرگ به سوی تولید برق هوشمندتر و مستقلتر با استفاده از خورشید هستند (Hammas et al., 2025).
چهار نوع کلیدی از سیستمهای ردیابی خورشیدی نوظهور در بخشهای بعدی بیشتر توضیح داده میشوند؛ ردیابهای هوشمند مبتنی بر هوش مصنوعی، ردیابهای مبتنی بر اینترنت اشیا، ردیابهای مبتنی بر GPS و ردیابهای هیبریدی که هر کدام مزایای خاص خود را در زمینه بهینهسازی عملکرد انرژی خورشیدی دارند.
۱-۳-۲- سیستم ردیابی خورشیدی یکپارچه با اینترنت اشیا
ردیابهای مبتنی بر اینترنت اشیا، اتصال مبتنی بر حسگر هستند که با تجزیه و تحلیل ابری ادغام میشوند تا نظارت بلادرنگ و کنترل از راه دور را تسهیل کنند. ویژگیهای اینترنت اشیا برای نظارت بر شرایط (مثلاً سطح گرد و غبار، نقص عملکرد محرکها)، نگهداری پیشبینیکننده و کنترل تطبیقی که پارامترهای ردیابی را بر اساس دادههای عملیاتی تنظیم میکند، در دسترس هستند. این امر باعث افزایش زمان آماده به کار و کاهش هزینههای بهرهبرداری و نگهداری میشود و در درازمدت مجموعه دادههایی را برای بهینهسازی در اختیار قرار میدهد (Muthukumar et al., 2023).
![]() شکل ۲۳- کاربردی از فناوری سیستم ردیابی خورشیدی؛ سیستم ردیابی خورشیدی یکپارچه با اینترنت اشیا که برای جمعآوری و نظارت بر دادهها به پلتفرم اینترنت اشیا Cayenne متصل است.
شکل ۲۳- کاربردی از فناوری سیستم ردیابی خورشیدی؛ سیستم ردیابی خورشیدی یکپارچه با اینترنت اشیا که برای جمعآوری و نظارت بر دادهها به پلتفرم اینترنت اشیا Cayenne متصل است.
۲-۳-۲- سیستم ردیابی خورشیدی مبتنی بر GPS
ردیابهای مبتنی بر GPS از دادههای زمان/موقعیت ماهواره به همراه الگوریتمهای موقعیت خورشیدی برای تعیین زاویههای صحیح آزیموت و ارتفاع استفاده میکنند. آنها به ویژه در مواردی که حسگرهای نوری غیرفعال هستند (مانند گرد و غبار شدید، برف یا نور پراکنده) مؤثر هستند و میتوانند به عنوان ورودی پشتیبان یا ترکیبی برای کنترلکنندههای مبتنی بر حسگر استفاده شوند. در آرایههای بزرگ، آرایههای محاسبهشده توسط GPS خطای نقطهگذاری تجمعی را به حداقل میرسانند و کالیبراسیون را سادهتر میکنند (Hammas et al., 2025).
![]() شکل ۲۴- سیستم ردیابی خورشیدی مبتنی بر GPS با کارایی بالا که برای ردیابی دقیق خورشید و تنظیم پنلهای فتوولتائیک استفاده میشود.
شکل ۲۴- سیستم ردیابی خورشیدی مبتنی بر GPS با کارایی بالا که برای ردیابی دقیق خورشید و تنظیم پنلهای فتوولتائیک استفاده میشود.
۳-۳-۲- سیستم ردیابی خورشیدی هیبریدی
ردیابهای هیبریدی، ردیابهایی هستند که از ترکیبی از تکنیکها (مثلاً کنترل حلقه بسته مبتنی بر حسگر و دادههای حلقه باز زمان/GPS، یا موتورهای فعال و محرکهای حرارتی غیرفعال) برای دستیابی به مزایای هر دو استفاده میکنند و اغلب به عنوان پیکربندیهای سیستم ردیابی خورشیدی پیشرفته برای ایجاد تعادل بین دقت و هزینه پیادهسازی میشوند. هدف از هیبریدها، حفظ سطح بالایی از دقت در شرایط متغیر با حداقل انرژی و هزینه نگهداری است. نمونههای اولیه میدانی ادعا میکنند که در مقایسه با پایههای ثابت، افزایش زیادی در انرژی دارند و همچنین در سایه یا سایر شرایط آب و هوایی نامساعد، قابل اعتمادتر هستند (Hammas et al., 2025).
![]() شکل ۲۵- معماری کنترل سیستم ردیابی خورشیدی هیبریدی با استفاده از دادههای LDR و GPS برای موقعیتیابی دقیق دو محوره (Hammas et al., 2025).
شکل ۲۵- معماری کنترل سیستم ردیابی خورشیدی هیبریدی با استفاده از دادههای LDR و GPS برای موقعیتیابی دقیق دو محوره (Hammas et al., 2025).
۴-۳-۲- سیستم ردیابی خورشیدی هوشمند
سیستمهای هوشمند ردیابی خورشیدی از الگوریتمهای پیشرفته یادگیری ماشینی و پیشبینی برای هوشمندتر کردن فرآیند ردیابی استفاده میکنند؛ این قابلیتها برای استقرار سیستم ردیابی خورشیدی پیشرفته مدرن، محوری هستند. برخلاف پاسخ به شدت نور در زمان واقعی یا جستجوی دادههای نجومی از پیش تعیینشده، چنین مدلهای مبتنی بر هوش مصنوعی، ورودیهای محیطی، روندهای آب و هوایی تاریخی و پیشبینیهای تابش را برای پیشبینی رفتار کوتاهمدت خورشید پردازش میکنند. آنها با تخمین مداوم زوایای بهینه شیب و آزیموت، حتی در صورت وجود شرایط نوری متغیر، ابری یا پراکنده، جذب انرژی را به حداکثر میرسانند. علاوه بر این، با توجه به اینکه سیستمها حرکات غیرضروری محرکها را به حداقل میرسانند، به حداقل رساندن سایش مکانیکی و مصرف انرژی مرتبط با تغییرات مکرر کمک میکنند. آزمایشهای میدانی و پروژههای آزمایشی نشان دادهاند که ردیابی مبتنی بر هوش مصنوعی میتواند منجر به بهبود قابل توجه عملکرد، به ویژه در آرایههای خورشیدی دو طرفه و مکانهایی با شرایط آب و هوایی پویا یا نیمه سایهدار شود (Araújo et al., 2024).
![]() شکل ۲۶- سیستم ردیابی خورشیدی هوشمند با استفاده از نظارت بر دادههای مبتنی بر هوش مصنوعی، نمونهای از یک سیستم ردیابی خورشیدی پیشرفته
شکل ۲۶- سیستم ردیابی خورشیدی هوشمند با استفاده از نظارت بر دادههای مبتنی بر هوش مصنوعی، نمونهای از یک سیستم ردیابی خورشیدی پیشرفته
۳- مقایسه عملکرد و بازدهی انواع ردیابهای خورشیدی
در اینجا ما یک مرور کلی مقایسهای از انواع اصلی سیستمهای ردیابی خورشیدی ارائه میدهیم و بر تفاوتهای موجود در فناوری سیستم ردیابی خورشیدی که بر عملکرد و بهرهبرداری و نگهداری تأثیر میگذارد، تأکید میکنیم. این مقایسه، توسعه پیکربندیهای سیستم ردیابی خورشیدی پیشرفته را نسبت به طرحهای سنتی با پیشرفتهای قابل توجه در فناوری سیستم ردیابی خورشیدی نشان میدهد که منجر به افزایش راندمان و عملکرد قویتر در عمل شده است.
جدول زیر محدودیتهای فنی اصلی، پتانسیل عملیاتی، نرخ عملکرد و انواع مدلها را نشان میدهد تا دید روشنی از نحوه عملکرد هر یک از مدلها در شرایط مختلف ارائه دهد.
جدول ۳- جدول مقایسه سیستمهای ردیابی مختلف (RAJAN K, 2016)
| نوع سیستم | عملکرد | قابلیتها | محدودیتهای فنی | |
| تک محوره | افقی | ۱۳ تا ۲۲ درصد بیشتر در مقایسه با پنلهای ثابت (NREL, 2008). |
پیچیدگی کمتر – ارزانتر – آسیب کمتر در هنگام طوفان |
فضای زیادی را اشغال میکند زیرا پنلها باید به صورت افقی چیده شوند. |
| عمودی | بازده انرژی به عرض جغرافیایی بستگی دارد و از ۱ تا ۲.۶ درصد در نزدیکی خط استوا تا حدود ۲۵ درصد در برلین افزایش مییابد. یک سیستم ردیابی خورشیدی تک محوره، بازده را تا ۳۰ درصد افزایش میدهد، در حالی که سیستم ردیابی خورشیدی دو محوره تنها حدود ۳ درصد بیشتر (Alkaff, 2019). |
پیچیدگی کمتر – ارزانتر | به راحتی تحت تأثیر نیروی باد قرار میگیرد. |
|
| کج شده | ۱۹ تا ۲۹ درصد بیشتر در مقایسه با پنلهای ثابت (تلفات ناشی از نیروی باد در نظر گرفته شده است) (NREL, 2008). |
برای عرضهای جغرافیایی کوچکتر (یعنی مکانهای نزدیکتر به خط استوا) مناسبتر است. |
زاویه شیب باید بسیار دقیق محاسبه شود تا از سایه اندازی و تلفات باد جلوگیری شود. |
|
| دو محوره | نوک-شیب | ۲۵ تا ۳۵ درصد بیشتر در مقایسه با پنلهای ثابت (به استثنای هزینه ساخت اضافی) (Musa et al., 2023). |
قابلیت ردیابی خورشید در هر دو جهت (شرق-غرب و شمال-جنوب) |
باید روی یک تیرک بلند که نیروی باد در آن بسیار زیاد است نصب شود. |
| ارتفاع-سمت | ۲۸ تا ۳۵ درصد بیشتر در مقایسه با پنلهای ثابت (بدون احتساب هزینه ساخت اضافی) (Eke, 2012). |
برای عرضهای جغرافیایی بزرگتر که تغییرات فصلی قابل توجهی در ارتفاع و قوس خورشید وجود دارد، مناسبتر است. |
مکانیزم چرخشی آن روی زمین نصب شده است، بنابراین فضای زیادی را اشغال میکند و برای آب و هوای شمالی با تجمع برف مناسب نیست. |
|
| منفعل |
۲۰ تا ۲۵ درصد بیشتر در مقایسه با پنلهای ثابت (Alemayehu and Admasu, 2023). |
در این سیستم، اجزای اضافی را میتوان با کمک مواد غیرفعال حذف کرد. |
هزینه مواد اولیه برای محرک بسیار بالاست و تهیه برخی از مواد دشوار است. همچنین، حرکت آنها در دماهای پایین کند است. |
|
| سیستم ردیابی خورشیدی پیشرفته (هوشمند، اینترنت اشیا، مبتنی بر GPS،ترکیبی) |
بسته به تابش و شرایط محل، در مقایسه با سیستمهای ردیابی خورشیدی تک یا دو محوره مرسوم، 5 تا 15 درصد بازده انرژی بیشتری کسب کنید (Hammas et al., 2025), (Araújo et al., 2024). |
پیشبینی مبتنی بر هوش مصنوعی، نظارت بر اینترنت اشیا و کنترل ترکیبی GPS/ سنسور را برای بهینهسازی تنظیم خورشیدی در زمان واقعی، کاهش سایه، فعال کردن تشخیص از راه دور و بهبود قابلیت اطمینان و کارایی تعمیر و نگهداری، ادغام کنید. |
پیادهسازی سیستمهای پیشرفته ردیابی خورشیدی به قطعات الکترونیکی و نرمافزارهای کنترلی پیچیدهتری نیاز دارد؛ این سیستمها ممکن است به اتصال داده وابسته باشند و هزینه اولیه و پیچیدگی بالاتری داشته باشند، هرچند معمولاً با بازگشت سرمایه سریعتر جبران میشوند. |
|
۴- نتیجهگیری
سیستمهای ردیابی خورشیدی با اطمینان از اینکه پنلهای خورشیدی در طول روز دائماً در جهت خورشید قرار دارند، در بهبود بهرهوری و عملکرد سیستمهای فتوولتائیک (PV) اهمیت دارند. تجزیه و تحلیل شده است که سیستمهای ردیابی خورشیدی تک محوره میتوانند ۱۲ تا ۲۵ درصد انرژی بیشتری نسبت به سیستمهای با شیب ثابت تولید کنند و سیستمهای ردیابی خورشیدی دو محوره بسته به موقعیت جغرافیایی و شرایط آب و هوایی میتوانند تا ۳۰ تا ۴۵ درصد انرژی بیشتری تولید کنند (Drury et al., 2013). سیستمهای ردیابی خورشیدی تکمحوری افقی در مقایسه با سیستمهای ردیابی خورشیدی دومحوری که اگرچه پیچیدهتر و گرانتر برای نگهداری هستند، اما در معرض تابش خورشید بهتری قرار میگیرند و در جایی استفاده میشوند که ملاحظه اصلی تولید حداکثر انرژی باشد، یک مصالحه مقرونبهصرفه از بهبود کارایی و سادگی مکانیکی دارند (Dahlioui et al., 2022). علاوه بر این، انتخاب یک سیستم ردیابی خورشیدی باید عوامل مختلفی را در نظر بگیرد که ممکن است شامل اندازه پروژه، در دسترس بودن زمین، شرایط آب و هوایی منطقه و توجیه اقتصادی باشد. سیستمهای ردیابی خورشیدی فعال و نیمهفعال دقیقتر هستند اما هزینه عملیاتی بالایی دارند، در حالی که سیستمهای غیرفعال و دستی هنوز هم میتوانند در پروژههای کوچک یا پروژههای کمبودجه استفاده شوند (Kuttybay et al., 2024).
سیستم ردیابی خورشیدی پیشرفته، شامل سیستم ردیابی هوشمند خورشیدی، متصل به اینترنت اشیا، ردیابهای GPS و ردیابهای هیبریدی، نسل جدیدی از توسعه سیستم ردیابی خورشیدی هستند. این نوآوریها هسته اصلی توسعه سیستم ردیابی خورشیدی پیشرفته را تشکیل میدهند، جایی که فناوری پیشرفته سیستم ردیابی خورشیدی، هوش مصنوعی، اینترنت اشیا و تجزیه و تحلیلهای پیشبینیکننده را برای اطمینان از همترازی بهینه، کاهش تعمیر و نگهداری و بهبود عملکرد انرژی در درازمدت ادغام میکند.
این سیستمها از هوش مصنوعی، شبکههای حسگر، و تحلیل دادههای بیدرنگ برای انجام بهینهسازی دینامیک عملکرد استفاده میکنند. ردیابهای هوشمند مبتنی بر هوش مصنوعی، الگوریتمهای پیشبینانه را برای پیشبینی تغییرپذیری موقعیت خورشید و تابش به کار میبرند، که تا ۵ الی ۱۰ درصد بهره بیشتر از حداکثر بازده سیستمهای ردیابی خورشیدی دومحوری سنتی به همراه دارند (Araújo et al., 2024). سیستمهای ردیابی خورشیدی مبتنی بر اینترنت اشیا، عیبیابی از راه دور و نگهداری پیشبینانه را بهبود بخشیده و زمان توقف را کاهش میدهند و کارایی عملیات را به حداکثر میرسانند (Muthukumar et al., 2023). مدلهای هیبریدی و مبتنی بر جیپیاس قادر به استفاده از موقعیتیابی ماهوارهای و حلقههای بازخورد نوری یا غیرفعال هستند، که آنها را قادر میسازد تا خورشید را با دقت حتی در شرایط ابری یا گردوغبار ردیابی کنند و پایداری سیستم و خروجی کلی انرژی را افزایش دهند (Hammas et al., 2025).
در مجموع، کارایی استفاده از انرژی خورشیدی با فناوری سیستم ردیابی خورشیدی پیشرفته بسیار افزایش مییابد، که پایداری و استقلال انرژی را بهبود میبخشد. با رشد جهانی انرژی خورشیدی، بهینهسازی فناوریهای ردیابی یکی از عوامل اصلی در کاهش هزینه متوسط تولید برق (LCOE) و توسعه بیشتر استفاده از انرژیهای تجدیدپذیر خواهد بود (Manzolini et al., 2024).
نویسنده: سبحان فخار نوغانی
کارشناسی ارشد مهندسی انرژیهای تجدیدپذیر، دانشگاه تهران
📧 ایمیل: Sobhan.fakhar@ut.ac.ir
🔗 LinkedIn
🔗 ResearchGate